
Koordinatsistemo

Ĝenerale koordinatsistemo estas maniero bildigi spacon el opoj de nombroj. Tio eblas laŭ diversaj manieroj.
La sistemo longituda-latituda uzata en geografio estas sistemo de sferaj koordinatoj; pliigante ĝin je tria koordinato, la alteco, oni povas per polusaj koordinatoj priskribi la situon de ĉiu punkto en nia universo (ignorante ties kurbecon).
Alia speco estas karteziaj koordinatoj, kiuj baziĝas sur sistemo de aksoj reciproke ortaj kaj sin sekcantaj en unu punkto, la origino.
En matematiko la nocio koordinatsistemo estas bazo de la lineara algebro kaj ties nocio de vektora spaco.
En astronomio per koordinatsistemoj oni priskribas la poziciojn de astronomiaj objektoj.
En geometrio, koordinatsistemo estas sistemo kiu uzas unu aŭ pluraj nombrojn, aŭ kunlaboras, por unike determini la pozicion de punkto aŭ alian geometrian elementon sur dukto kiel ekzemple eŭklida spaco. La ordo de la koordinatoj estas signifa, kaj ili foje estas identigitaj per sia pozicio en ordigita Opo kaj foje per litero, kiel en "la ikso-koordinato ". La koordinatoj estas prenitaj por esti realaj nombroj en rudimenta matematiko, sed povas esti kompleksaj nombroj aŭ elementoj de pli abstrakta sistemo kiel ekzemple komuta ringo. La uzo de koordinatsistemo permesas, ke problemoj en geometrio estu tradukitaj en problemoj pri nombroj kaj inverse; tio estas la bazo de analitika geometrio.
Oni uzas sistemojn el sferaj koordinatoj. Ili baziĝas je difino de akso, kiu fiksas la polusojn, kaj nulpunkto en la baza ebeno (ekvatora ebeno) de la koordinatsistemo. Sferaj koordinatoj konsistas el du angulkoordinatoj por direkto, longitudo (angula distanco de la nulpunkto laŭ la ekvatoro) kaj latitudo (alteco super la ekvatoro) plus radiusa koordinato. Ĉi lastan oni kutime ne indikas, ĉar ĝi ne gravas por la retrovo de la astronomia objekto.
Uzataj estas tri absolutaj koordinatsistemoj por determini astronomian pozicion: ekvatora koordinatsistemo, ekliptika koordinatsistemo kaj galaksia koordinatsistemo.
Kartezia koordinatsistemo
[redakti | redakti fonton]
Abscisa akso estas X'OX.
Ordinata akso estas Y'OY.
Koordinatoj de punkto A estas valoroj b - absciso kaj a - ordinato ili ambaŭ estas pozitivaj ĉi tie.
I, II, III, IV estas signoj de kvaronoj de la koordinata ebeno.

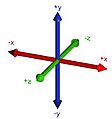
Koordinatoj de punkto A estas valoroj a, b, c - X, Y, Z koordinatoj respektive.
Kartezia koordinatsistemo en ebeno estas koordinatsistemo, kiu precizigas ĉiun punkton unike per paro da nombraj koordinatoj, kiuj estas la signitaj distancoj al la punkto de du fiksaj perpendikularaj orientitaj linioj, mezuritaj en la sama longounuo.
Sur la rekto kun du diversaj punktoj A kaj B, ni povas elekti du direktojn: de A al B, aŭ de B al A. Ni nomu, ekzemple la direkton de A al B, la pozitiva direkto. Oni povas establi unu-al-unuan konformecon inter reelaj nombroj kaj la aro de la punktoj de donita rekto. Ni konformu al 0 ian punkton sur la rekto kaj nomi ĝin originpunkto. Ni akceptu ian detranĉon de la rekto kiel unuo de la longo. Al ĉiu reela nombro ni konformu la koncernan punkton, kiu distancas de originpunkto per a distanco: al pozitiva direkto por "+a" nombro kaj al negativa direkto por "-a" nombro. La konstruita rekto estas la nombra rekto aŭ koordinata akso.
- Koordinato estas nombro, kiu konformas al la konkreta punkto de la akso.
- Aro de ĉiu punkto, kiu kontentigas la malegalecon a ≤ x ≤ b, estas nomita detranĉo (fermita intervalo) kaj signatas per simboloj [a;b], t.e. [a;b]={x ∈ R | a ≤ x ≤ b}.
- a kaj b nomiĝas limpunktoj kaj la diferenco b - a - longo de intervalo.
- Analogie ekzistas malfermita intervalo: [a;b]={x ∈ R | a < x < b} kaj duonfermitaj intervaloj: [a;b]={x ∈ R | a < x ≤ b} kaj [a;b]={x ∈ R | a ≤ x < b}.
Polusa koordinatsistemo
[redakti | redakti fonton]En matematiko, la polusa koordinatsistemo estas 2-dimensia koordinatsistemo en kiu ĉiu punkto sur ebeno estas difinita per angulo kaj distanco. La polusa koordinatsistemo estas aparte utila en situacioj, kiam la interrilato inter du punktoj estas plej facile esprimebla en terminoj de angulo kaj distanco; en la pli konata kartezia aŭ rektangula koordinatsistemo, tia angula interrilato povas esti kalkulita nur per trigonometriaj formuloj.
Ĉar la koordinatsistemo estas du-dimensia, ĉiu punkto estas difinita per du polusaj koordinatoj: la radiusa koordinato kaj la angula koordinato. La radiusa koordinato (kutime skribita kiel ) estas la distanco inter la koordinatigita punkto kaj la centra punkto de la koordinatosistemo. La centra punkto estas ankaŭ nomata poluso (ekvivalento de la origino en la Kartezia sistemo). La angula koordinato (ankaŭ nomata polusa angulo aŭ azimuta angulo, kutime skribita kiel θ aŭ ) estas la pozitiva angulo (aŭ angulo mezurita maldekstrume, malhorloĝdirekte) de la polusa akso (la 0°-a radio) al la koordinatigita punkto. La polusa akso estas ekvivalento de pozitiva duono de abscisa akso (x-akso) en la Kartezia koordinata ebeno.[1]


Cilindra koordinatsistemo
[redakti | redakti fonton]
La cilindra koordinatsistemo estas koordinatsistemo kiu etendas la du-dimensian polusan koordinatsistemon per aldono de tria koordinato, kiu estas la alto de punkto super la ebeno, simile al la maniero per kiu la karteziaj koordinatoj estas etendita en tri dimensiojn. La tria koordinato estas kutime skribata h, kaj do estas la tri cilindraj koordinatoj (r, θ, h).
La tri cilindraj koordinatoj povas esti konvertita al karteziaj koordinatoj per

Sfera koordinatsistemo
[redakti | redakti fonton]
Polusaj koordinatoj ankaŭ povas esti etenditaj en tri dimensiojn kiel sfera koordinatsistemo de koordinatoj (ρ, φ, θ), kie ρ estas la distanco de la fonto, φ estas la angulo de la z-akso (nomata kiel la zenita distanco[2], ĝi estas inter 0 kaj 180°) kaj θ estas la angulo de la abscisa akso (kiel en la 2-dimensiaj polusaj koordinatoj). Ĉi tiu koordinatsistemo estas simila al la latitudo kaj longitudo uzataj por geografio, kun la fonto en la centro de Tero, la latitudo δ estas la komplemento de φ, difinita kiel δ = 90° − φ, kaj la longitudo l estas l = θ , ĉi tie l estas inter −180° kaj −180°.[3]
La tri sferaj koordinatoj estas konvertataj al karteziaj koordinatoj per

Bildaro
[redakti | redakti fonton]-
 Sistemo de dudimensiaj karteziaj koordinatoj utilaj en urbo por lokigi la ejojn necesajn por akvoliverado kaj defluigo de uzita akvo.
Sistemo de dudimensiaj karteziaj koordinatoj utilaj en urbo por lokigi la ejojn necesajn por akvoliverado kaj defluigo de uzita akvo. -
-
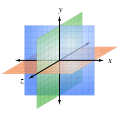 Sistemo de tridimensiaj karteziaj koordinatoj.
Sistemo de tridimensiaj karteziaj koordinatoj. -
 Polusa koordinatsistemo kun kelkaj anguloj indikitaj en gradoj.
Polusa koordinatsistemo kun kelkaj anguloj indikitaj en gradoj.




Vidu ankaŭ
[redakti | redakti fonton]- Transformo de Galileo
- Cilindra koordinata sistemo
- Geografia koordinatsistemo
- Homogenaj koordinatoj
- Kadro de referenco
- Kartezia koordinato
- Lorenca transformo
- Nombra akso
- Regulo de la dekstra mano
- Sfera koordinata sistemo
Notoj
[redakti | redakti fonton]- ↑ Brown, Richard G.. (1997) Andrew M. Gleason: Advanced Mathematics: Precalculus with Discrete Mathematics and Data Analysis - Progresinta Matematiko: Antaŭkalkulo kun Diskreta Matematiko kaj Datuma Analitiko. Evanston, Ilinojo: McDougal Littell. ISBN 0-395-77114-5.
- ↑ Zenita distanco laŭ NPIV [1]
- ↑ . Alirita 16-a de septembro 2006.
Bibliografio
[redakti | redakti fonton]- Voitsekhovskii, M.I.; Ivanov, A.B. (2001) [1994], "Coordinates", Encyclopedia of Mathematics, EMS Press
- Woods, Frederick S.. (1922) Higher Geometry. Ginn and Co., p. 1ff.
- Shigeyuki Morita. (2001) Geometry of Differential Forms. AMS Bookstore. ISBN 0-8218-1045-6.